
【導讀】當下,人形機器人產業正從“技術秀場”邁向“實戰落地”的關鍵階段,市場的核心訴求已不再是“機器人能完成什么動作”,而是其能否在真實復雜場景中保持穩定運行、實現大規模量產部署。作為融合感知、決策、執行與供電等多模塊的高度耦合系統,人形機器人的復雜度持續攀升,僅針對單一器件的驗證早已無法滿足需求,多模塊耦合帶來的“測試難題”已成為產業化推進的核心阻礙。在此背景下,測試測量技術正從輔助驗證工具升級為工程落地的核心支撐,成為破解系統穩定性瓶頸、打通從實驗室研發到商業化應用“最后一公里”的關鍵力量。
系統復雜度提升帶來的測試挑戰
人形機器人本質上是一套高度耦合的復雜系統,涵蓋感知、決策、執行及供電等多個關鍵環節。從多模態傳感器的數據采集,到AI芯片與高速互聯鏈路的數據處理,再到電機驅動系統的動作執行,以及電池與電源系統的能量供給,每一個環節都高度關聯。
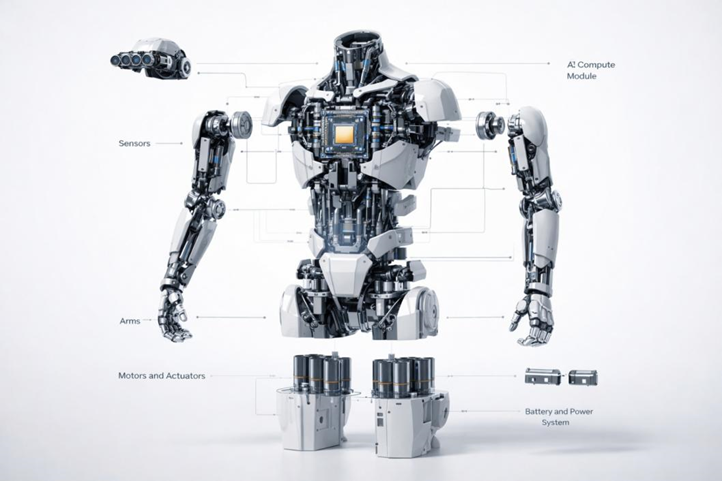
在這樣的系統中,問題往往并非來自單一器件,而是多個子系統之間的耦合效應。例如,高速鏈路中的信號完整性問題可能導致感知延遲,驅動系統的瞬態響應問題可能引發動作不穩定,而電源或電池系統的波動則可能進一步放大這些問題。
隨著系統復雜度提升,測試需求也從單點驗證轉向多維度協同分析。
多維耦合下的“難測性”挑戰
人形機器人的測試難點,在于多個關鍵維度需要同時滿足。一方面,高速互聯鏈路承載著越來越大的數據傳輸壓力。PCIe等接口已成為系統性能瓶頸,其穩定性直接影響感知與決策效率。另一方面,執行系統中的動態信號具有強瞬態特征。電機驅動、電流變化以及寬禁帶功率器件的動態行為,對測試設備的帶寬、噪聲及抗干擾能力提出了更高要求。
同時,動力系統的復雜性也在不斷提升。電池不僅影響續航能力,還直接關系到系統在動態負載下的穩定輸出,其一致性、電化學特性以及壽命表現均成為關鍵指標。
因此,人形機器人測試的核心,已轉變為覆蓋感知、傳輸、控制、執行及供電的全鏈路驗證。
從單點測試走向系統級驗證
面對上述挑戰,傳統基于單一測項的測試方法已難以滿足需求。行業正在向系統級、全鏈路的測試體系演進。圍繞人形機器人的核心架構,測試需求已逐步形成多層級覆蓋:
在感知層,需要對MIPI、GMSL、FPD-Link等鏈路進行圖像與視頻數據完整性驗證;
在決策控制層,需要對PCIe等高速總線進行一致性與穩定性測試,以支撐高算力系統運行;
在執行層,需要對電機控制策略與功率器件動態行為進行分析,確保動作響應的準確性;
在動力與供電層,則需要對電池、電源及相關系統進行綜合評估,以保證長期穩定運行。
這一變化意味著,測試測量正在從“驗證工具”轉變為系統設計與優化的重要組成部分。
測試方案體系如何支撐工程落地
針對人形機器人多維耦合的測試挑戰,行業需要的不再是單一設備,而是一套能夠覆蓋完整鏈路的測試解決方案。
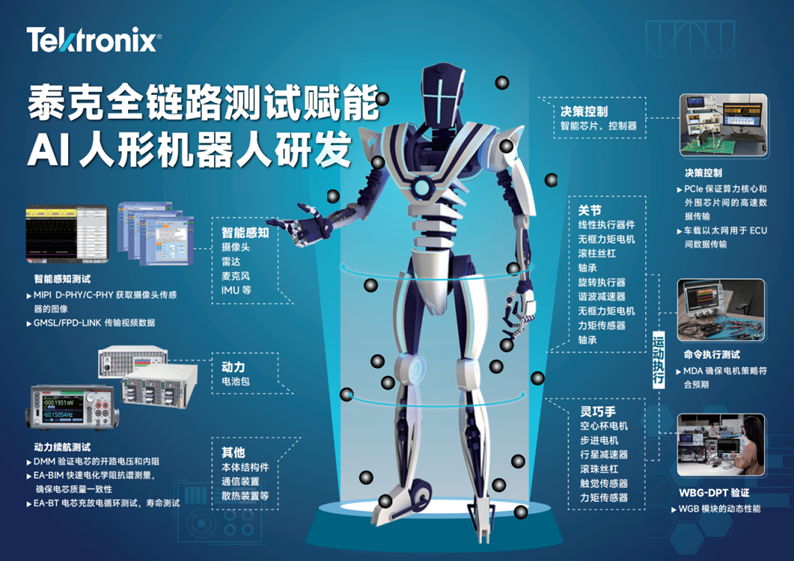
在這一背景下,泰克作為相關的測試測量廠商,正圍繞機器人核心架構構建系統化測試能力:
在高速互聯領域,通過高帶寬示波器與協議分析方案,實現對PCIe等關鍵接口的數據完整性驗證;
在電機與功率測試方面,結合動態功率分析(如IMDA)與寬禁帶器件測試(如WBG雙脈沖測試),幫助工程師捕捉關鍵瞬態行為;
在電源與電池測試方面,通過高精度數字萬用表、電池阻抗測試及電源完整性分析手段,對電池一致性、電源穩定性及系統供電能力進行評估;
在復雜電磁環境下,通過低噪聲測量能力,還原真實信號,避免測試結果被系統噪聲掩蓋。
這些測試能力的核心價值,不僅在于“測量結果”,更在于幫助工程師在系統層面理解問題來源,從而優化設計并提升整體可靠性。
未來的工程競爭力,從技術驗證到工程應用是關鍵一步
隨著人形機器人逐步走向實際應用,行業對系統可靠性的要求持續提升。技術能否真正落地,不僅取決于算法與硬件能力,也取決于是否具備完善的驗證體系。測試測量在這一過程中,正在發揮越來越重要的作用——通過對信號、鏈路與系統行為的精準分析,使復雜系統變得可理解、可驗證、可優化。
當前,面對感知層的高速數據傳輸、決策層的高算力需求、執行層的瞬態動作響應,以及動力層的穩定能量供給,行業迫切需要搭建一套貫穿全鏈路的系統級驗證框架。借助精準的信號解析與系統行為驗證,測試測量技術能幫助工程師在復雜的耦合關系中精準定位問題、優化設計方案,進而保障機器人在實際運行中的穩定性與一致性。未來,產業發展的節奏將由工程化能力的成熟度決定,而一套完善的測試驗證體系,正是推動人形機器人從“能演示”邁向“能大規模落地”的關鍵支撐。



